Funktionsweise Mobile Mapping
Scannen in Bewegung
Getragen wird der VLX3 auf den Schultern mit zusätzlicher Abstützung in einem breiten Hüftgurt. Bei normaler Haltung des scannenden Mitarbeiters misst ein Scanner sich um 360° drehend mehr oder weniger horizontal, der andere tendentiell vertikal. Dies bedeutet, dass sowohl Punkte vor, seitlich und hinter dem Mitarbeiter, als auch ober- und unterhalb, sowie ebenfalls seitlich aufgenommen werden.
Dadurch, dass die Scanner (im Vergleich zu anderen mobile Mappingsystemen) nicht mehr nur in einer Zeile scannen, sondern einen Öffnungswinkel von 30° aufweisen, kann sozusagen im Vorbeigehen fast jedes Objekt im Raum dreidimensional erfasst werden.
Nimmt der Bediener den VLX ab und hält ihn per Hand in Nischen und Ecken, können auch kleine fast unzugängliche Objekte gescannt werden.
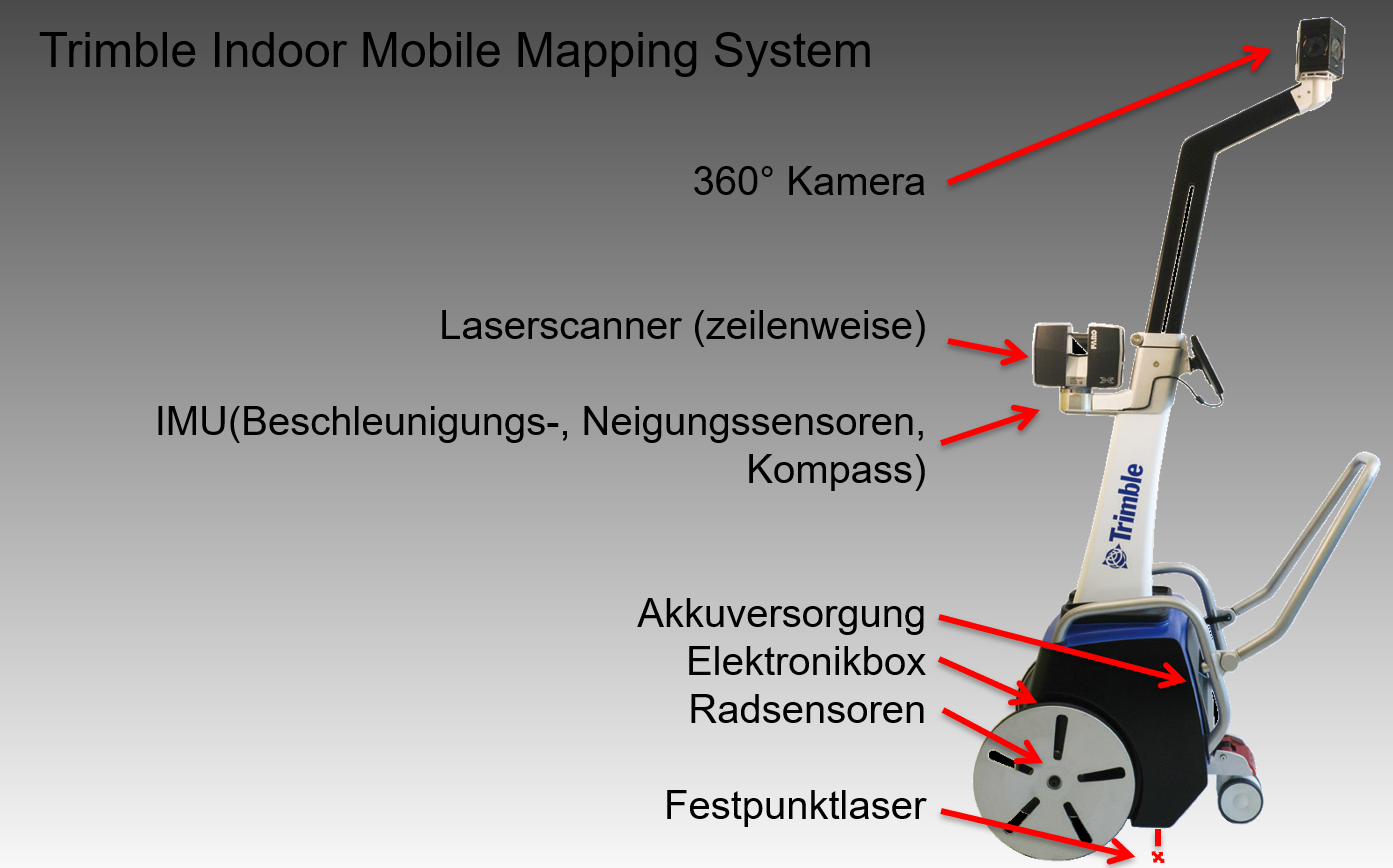
Da in Bewegung gescannt wird, gilt es das Problem zu lösen, an welcher Stelle sich der Scanner befunden hat, als jeder einzelne Messpunkt erzeugt wurde. Ebenso ist die Richtung, in die der Scanner gemessen hat, in der Horizontalen und Vertikalen sowie eine Verkippung um die Richtung der Wegeachse zu bestimmen. Die dazu erforderliche Sensorik ist im Wagen verbaut.
Inertialsysteme (IMU oder Trägheitsnavigationssysteme) sind Messgeräte, die früher nur in der Luftfahrt Anwendung fanden. IMU’s erfassen jede Winkel- und Beschleunigungsveränderung in den drei Raumdimensionen über Drehratensensoren (Faser-, Laserkreisel bzw. Gyroskope) und Beschleunigungssensoren. Die relativen Bewegungsänderungen werden mit dieser Methode hochgenau erfasst. Leider driften die Ergebnisse mit länger werdender Messzeit ab. Dies gilt es durch Vermessungs-Know-How zu kompensieren.
In der Auswertesoftware wird also zunächst aus allen zur Verfügung stehenden Sensoren der Weg des jeweiligen Scannermittelpunktes hochgenau ermittelt und mit der präzisen Zeit kombiniert. Diese sich im Raum befindliche Kurve aus Lage- und Zeitinformation wird Trajektorie genannt. Es ist also eine Linie, den Laufweg des Messwagens beschreibt.
Ist diese bekannt, wird im zweiten Schritt anhand des Aufnahmezeitpunktes und der Position entlang der Trajektorie eine 3D-Koordinate für jeden Messpunkt ermittelt. Die Gesamtheit aller Messpunkte wird – wie beim Laserscanning üblich – Punktwolke genannt.
Das Messsystem wird auf Passpunkte gehalten, um die absolute Lage im Raum zu bestimmen. Hier können Ihre nutzerspezifischen Koordinatensysteme (Werks- oder Gebäudesysteme) ebenso verwendet werden, wie UTM-Koordinaten. Weitere Passpunkte dienen der Qualitätskontrolle bzw. -verbesserung im Laufe der Messung. Alle Passpunkte werden mit Hilfe von Tachymetermessungen bestimmt und für die Dauer der Messungen am Fußboden oder an Wänden markiert.
Zusätzlich sind hochauflösende Kameras im VLX3 eingebaut, mit denen der Bediener farbige 360° Panoramen an den jeweiligen Aufnahmestandpunkten erstellt. Der Bearbeiter im Büro hat also sowohl die Punktwolke als auch die Panoramen zur weiteren Auswertung zur Verfügung und kann so 3D-Modelle / BIM-Modelle erstellen.

360° Panorama der Rundumkamera im Treppenhaus